




































































































































































































































































电光Q开关.jpg)


































| 名称 | 型号 | |
| 机械件 | 铝板 尺寸=300×300mm 厚度=13mm | 516002 |
| 螺纹转换适配器 Ø31.75mm L=11mm | 504074 | |
| 30mm笼式45°安装调整架 M3笼杆螺纹 M4/M6螺纹 | 530047 | |
| 30mm笼式安装板 C-Mount螺纹 | 530057 | |
| 30mm笼式安装板 M26 x 0.706螺纹安装 | 530106 | |
| 30mm笼式安装板 夹持尺寸φ25.4mm 压圈固定 | 530054 | |
| 30mm笼式安装板 夹持尺寸φ25.4mm 压圈固定 | 530053 | |
| 60x60mm 垂直式移动平台 | 518201 | |
| 台面尺寸60x60mm 双轴精密位移台 | 516351 | |
| Φ6mm笼式安装接杆 长12.5mm M3 | 530000 | |
| Φ6mm笼式安装接杆 长100mm M3 | 530005 | |
| 卡入式30mm笼式系统安装架 | 530034 | |
| 支撑棒 长度=50.8mm 直径=Φ12.7mm | 524202 | |
| U型带磁性棒座 高度=37.5mm | 523951 | |
| 光学件 | 未装配正胶合消色差透镜 D=25.40mm F=100.00mm VIS N-BK7/SF5 | 145058 |
| 普通长波通二向色滤光片 Φ25mm 反射带:565~715nm 透射带:770~1200nm | 238527 | |
| 经济型短波通滤光片 Φ25mm 透射带:400~725nm 截止带:800~990nm | 218609 | |
| 平面反射镜基片 Φ25.0mm 无镀膜 精退火K9光学玻璃 | 260020 | |
| 物镜 | 100X M PLAN APO 远场校正长工作距离物镜 | 690005 |
| CMOS | 分辨率 5496×3672 | MER2-2000-19U3C-L |
| 激光器 | 单模光纤耦合准直输出激光器 785nm 50mw 含准直镜可调焦 SM1适配件 | HY3026-231020-001 |
| 照明光源 | 面光源 含控制器 | HY3026-231020-002 |
| 样品夹具 | 样品池架 光源架 | HY3026-231020-003 |
| 微球及样品池 | 二氧化硅 5um 凹面样品池 | HY3026-231020-004 |
| 包装 | 铝合金框架航空箱 | HY3026-231020-005 |
早在1970年,Ashkin等人就提出可以利用光压操纵微米大小的粒子;1986年,Ashkin仅用一束聚焦的激光的稳定能量阱俘获粒子,并将其命名为单束光梯度力阱(single-beam optical gradient force trap),标志光镊的正式诞生。根据光波长(λ)和粒子尺寸(D)的关系,光镊可分为三种机制:几何光学机制(粒子尺寸远大于波长D>>λ)、瑞利机制(粒子尺寸远小于波长D<<λ),其余情况可认为是中间机制。光波长在几百纳米至千纳米之间,满足瑞利机制的球体直径只有几十纳米,我们只介绍几何光学理论。
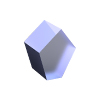
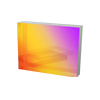
可用几何光学描述的情况如图1所示。高斯光束的传播方向沿z轴正向,在垂直与z轴的向量方向上,满足高斯函数。图1展示了一个折射率比水大的微球(n水=1.33),并陈列了典型光线a和b,其中光线a的强度更大。光线a照射到微球表面同时发生折射与反射,折射光线用黑实线箭头表示,反射光线则用虚线箭头表示。光子携带的动量方向与其传播方向一致,根据经典力学,由于折射光与入射光存在动量角度差,产生的偏向力用FiD表示,入射光与反射光共同作用产生的散射力用FiR表示。同理,出射光同样会产生偏向力F0D和散射力F0R。对应的,光线b产生的力与a类似。角标规则:右上角的角标i和o分别表示入射(input)和出射(output);右下角的D和R分表表示偏向力(deflection pressure)和散射力(radiation pressure)。图1微球收到包含+z和-r方向的合力,运动方向与合力方向一致。分析可知,只有处于光轴的微球不受水平方向的力,其他位置的微球都受到指向光轴的梯度力,最终会移动到光轴中央。我们可以用二维势阱图2来描述这种力场,梯度力只要足以驱使势阱边缘的微球运动,该球最终必然会被势阱捕获。.png)
可用几何光学描述的情况如图1所示。高斯光束的传播方向沿z轴正向,在垂直与z轴的向量方向上,满足高斯函数。图1展示了一个折射率比水大的微球(n水=1.33),并陈列了典型光线a和b,其中光线a的强度更大。光线a照射到微球表面同时发生折射与反射,折射光线用黑实线箭头表示,反射光线则用虚线箭头表示。光子携带的动量方向与其传播方向一致,根据经典力学,由于折射光与入射光存在动量角度差,产生的偏向力用FiD表示,入射光与反射光共同作用产生的散射力用FiR表示。同理,出射光同样会产生偏向力F0D和散射力F0R。对应的,光线b产生的力与a类似。角标规则:右上角的角标i和o分别表示入射(input)和出射(output);右下角的D和R分表表示偏向力(deflection pressure)和散射力(radiation pressure)。图1微球收到包含+z和-r方向的合力,运动方向与合力方向一致。分析可知,只有处于光轴的微球不受水平方向的力,其他位置的微球都受到指向光轴的梯度力,最终会移动到光轴中央。我们可以用二维势阱图2来描述这种力场,梯度力只要足以驱使势阱边缘的微球运动,该球最终必然会被势阱捕获。
图1. 光镊几何光学机制原理图
.png)
图2. 二维势阱示意图
图2. 二维势阱示意图




